
前言
背光显示器随处可见,笔记本电脑显示,智能手机显示,液晶显示器等,所有这些都利用了背光显示屏。在任何情况下都要有一个均匀的光照,以实现明亮清晰的图像。最常见的背光技术是LCD,LED被用于背光系统,结合亮度增强膜,扩散片和导光结构。导光常见方法是创建一个纹理模式,沿着系统均匀地提取光线。Speos提供的3DTexture功能,允许用户虚拟模式数以千计的微观光学元素,而不用担心内存限制。为了优化这种模式,在Speos中对Texture模型进行参数化,并利用optiSLang执行参数敏感性分析,然后对系统进行鲁棒优化,以实现想要的结果。
操作流程概述
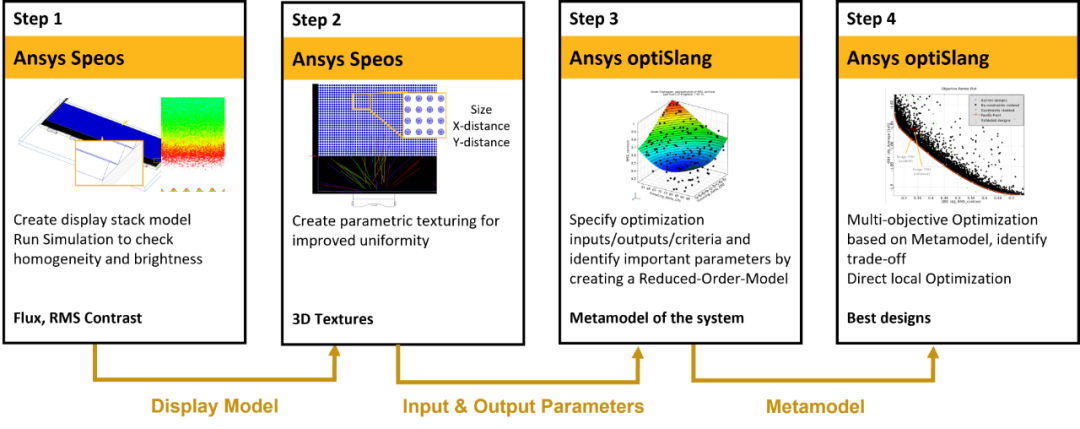
这个模拟需要2个产品:
Speos用于建模显示堆层,背光的3DTexture网点分布;
optiSLang以研究参数敏感性和优化设计性能。
第一步:Speos显示结构的创建和分析
在一步中,在Speos中定义了显示结构的光学和机械组件。一些参数将在以后作为优化的输入(例如,3D texture 网点的密度),但在这个初始结构中,只给出初始设定值。然后进行光学模拟,将定量输出转换为优化目标。这些值表明该设计在光输出、均匀性、可制造性等方面。
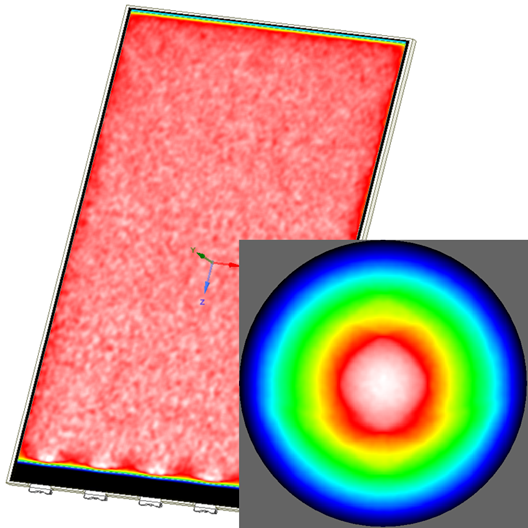
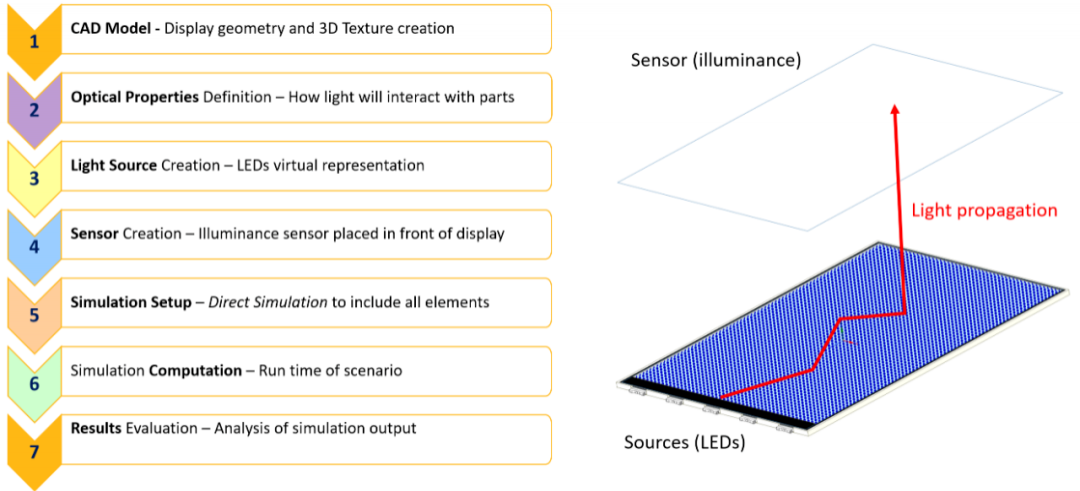
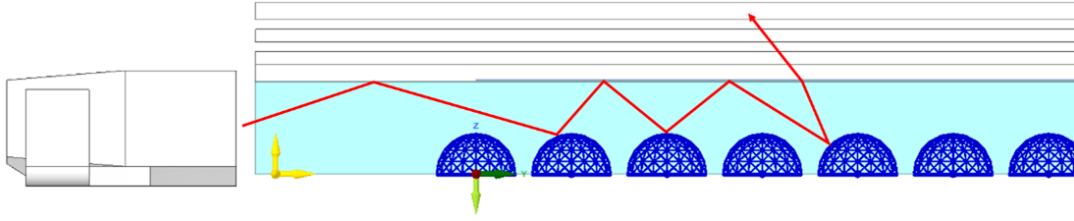
1.Speos允许构建基于物理光学属性的场景结构,在这一步中,遵循如下所示的标准模拟过程,以获得最终用户将在最终产品中获得的视觉感知。注意:为了可视化目的,本图像中的亮度传感器被放置在离显示器相对较远的位置。
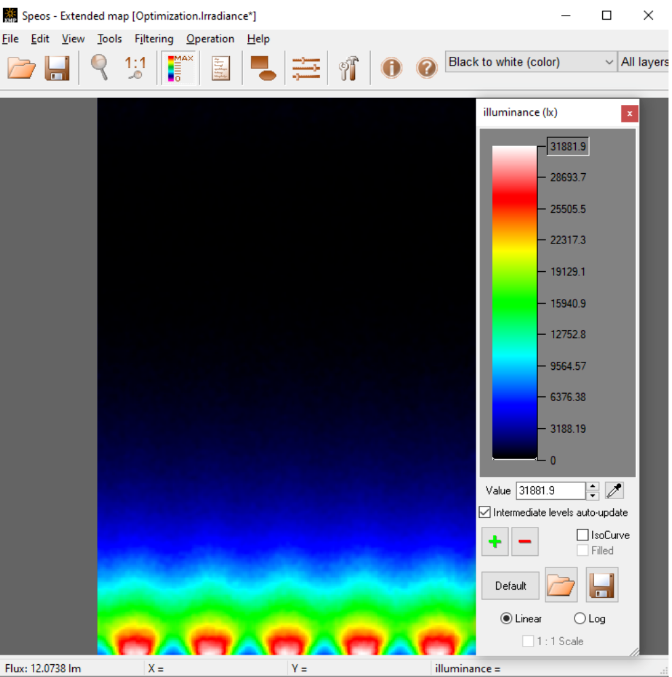
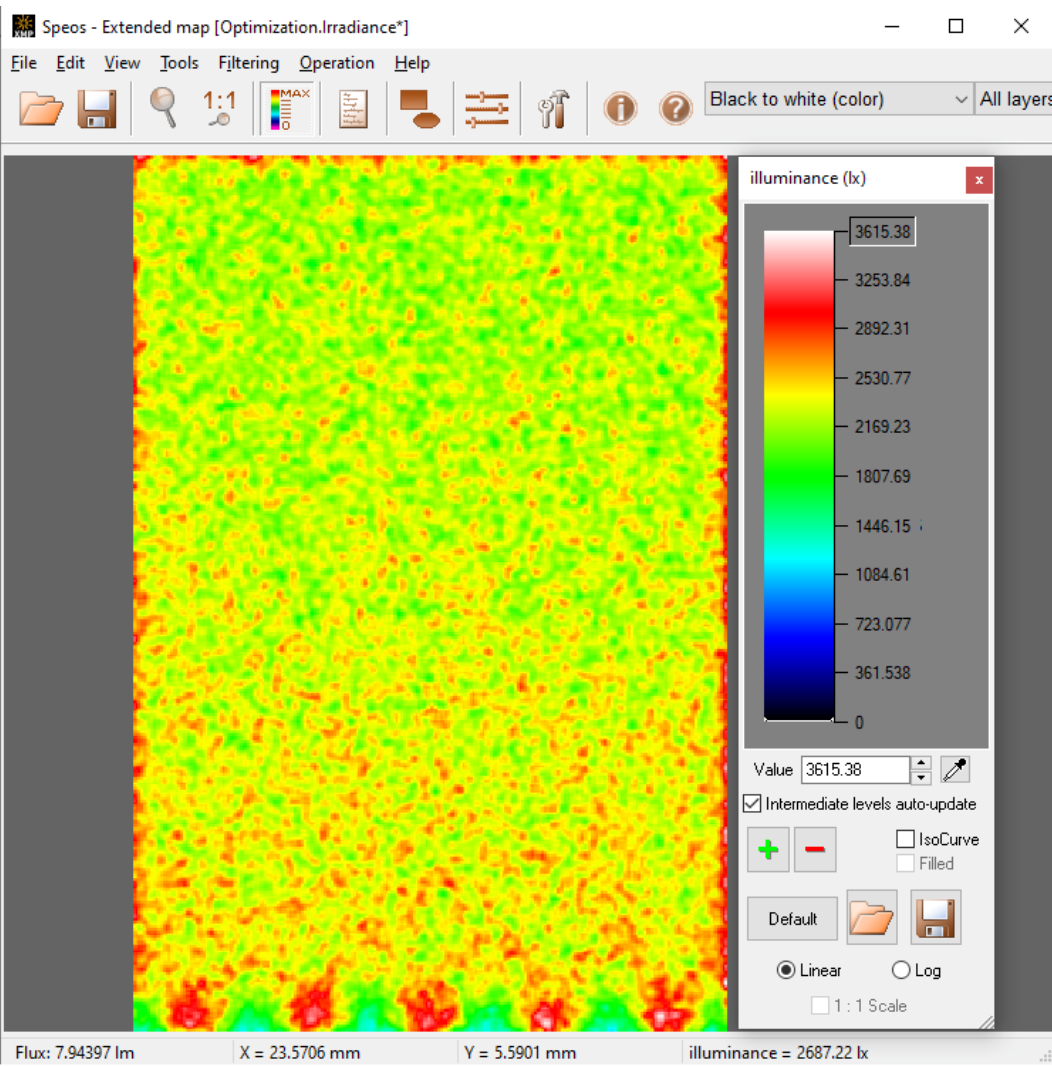
2.照度仿真结果给出了XMP结果,每个像素都包含了照度信息。显然,初始设计在总通量和均匀性(RMS对比)方面的性能都很差。因此,需要进行优化。
第二步:Speos 3D texture导光网点创建
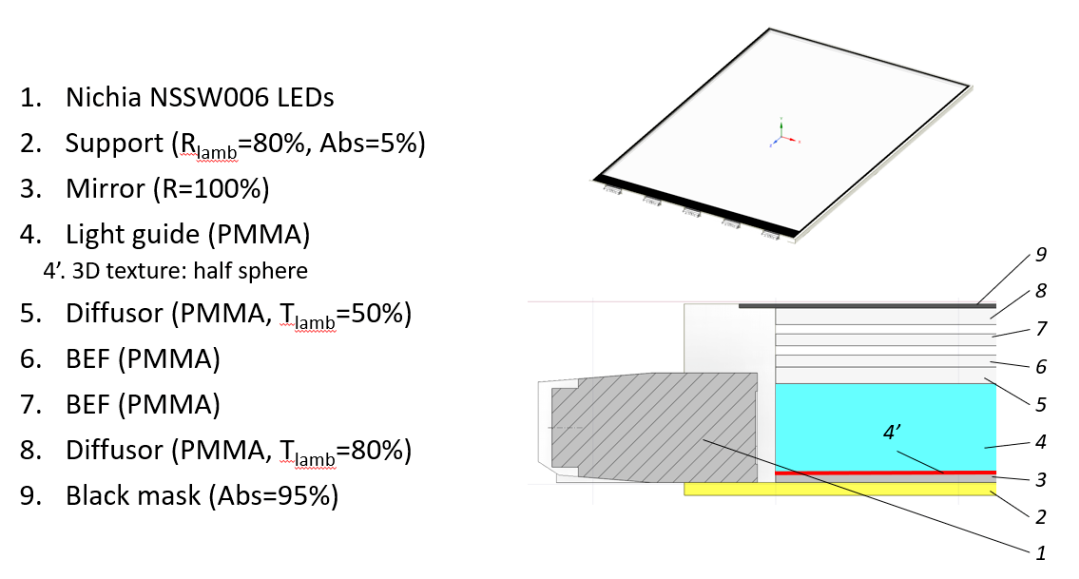
来自Speos的Speos 3D Texture功能允许通过建模和在几何图形上投影数百、数千或数百万个几何项目来模拟微纹理。在这里举例,使用半球图案的3D Texture应用到导光板的背面,它被设置为从基础导光板上remove材料。半球体的最终阵列方式由参数输入控制,参数最终可由optiSLang控制。

在Speos中使用3DTexture减少了计算时间和文件大小,在这一步中,数百个半球体图案被应用到导光板的背面,并被命令从背光板删除它们的体积。3DTextue参数的操作改变了图案的大小和密度,从而改变了光的输出和光导的均匀性。
第三步:optiSLang敏感性分析
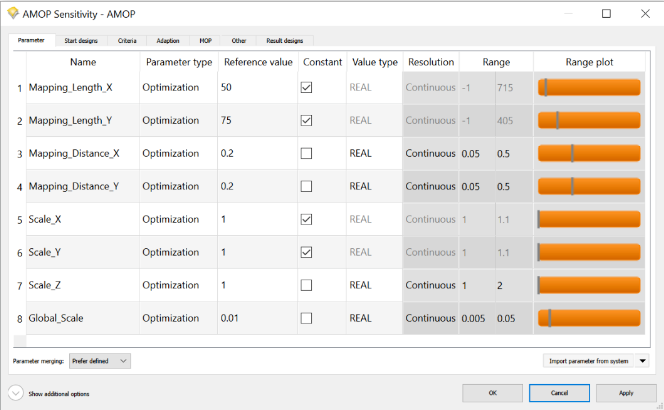
在Speos中创建模型和仿真之后在optiSLang中设置优化。这个过程的一部分需要灵敏度分析,它将确定影响结果的最关键的输入。这些完全相同的输入同时被定义为一个参考值为常数或非常数,并且在一个工作范围内。采用optiSLang的最优预后自适应元模型(AMOP)方法进行敏感性分析。它表示输入的所有可能组合的近似结果。

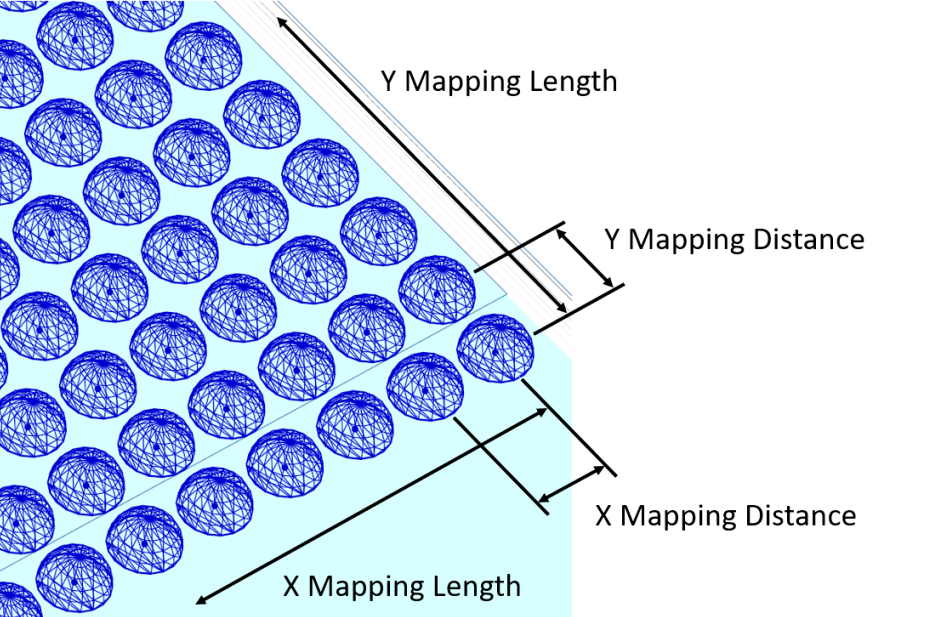
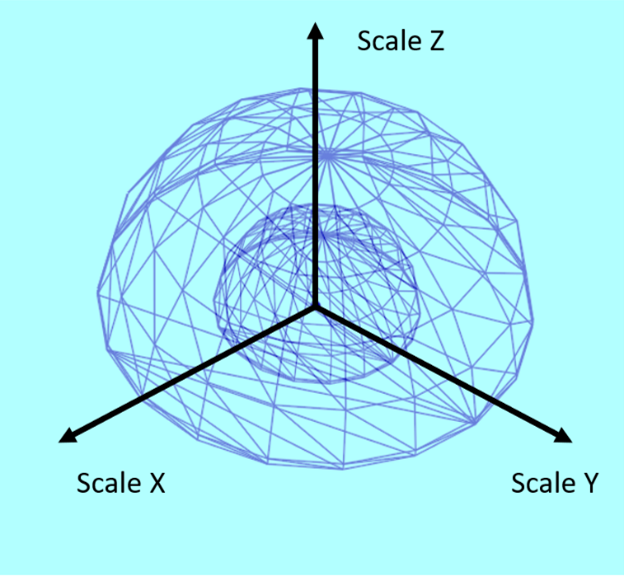
这里,X和Y的映射距离,图形全局尺度,Z方向的尺度作为输入,总通量,RMS对比度(用于测量一致性)作为输出结果。
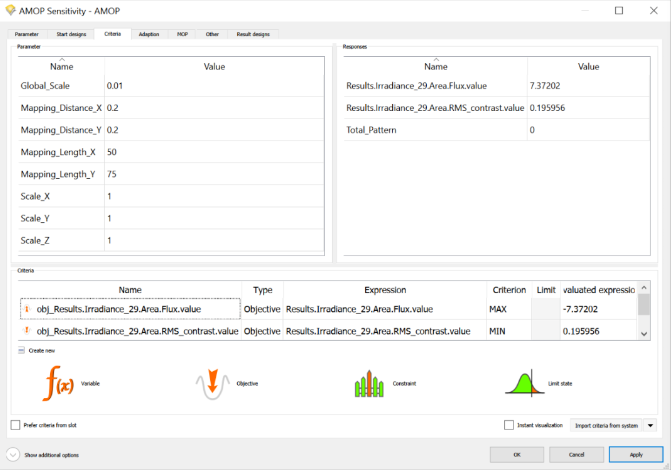
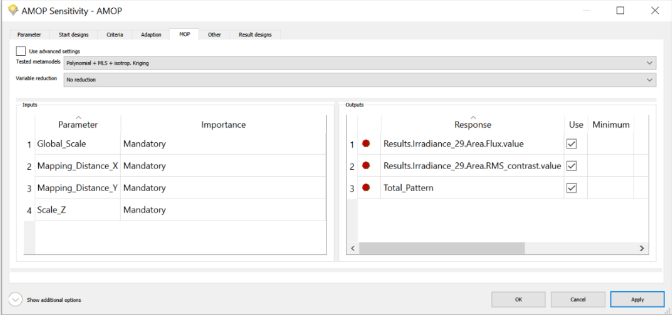
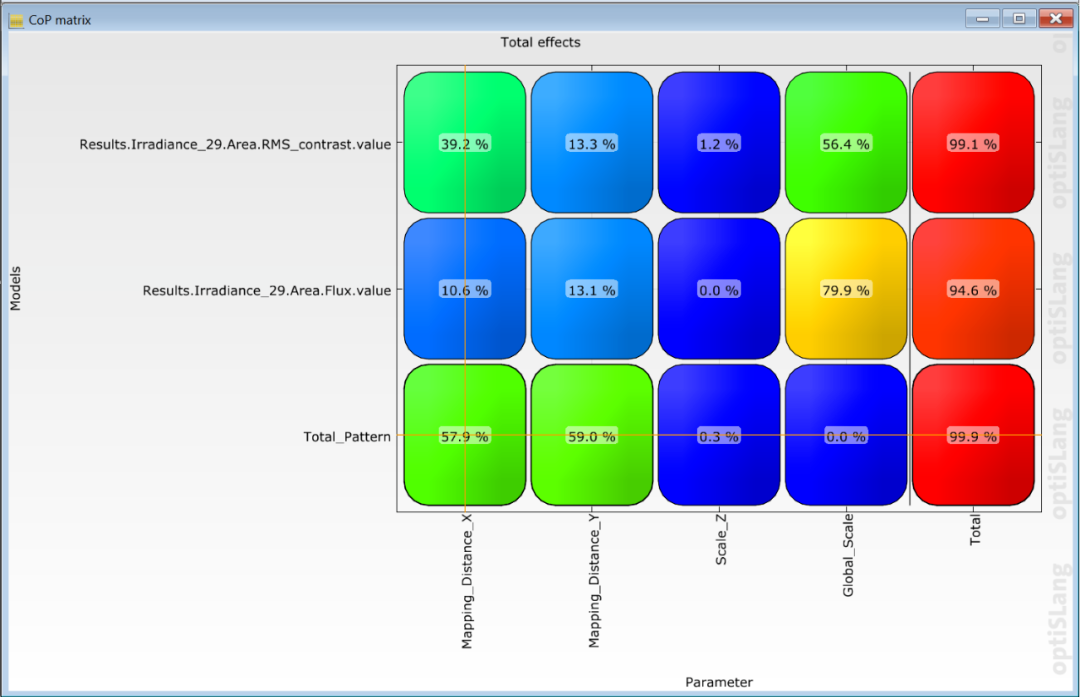
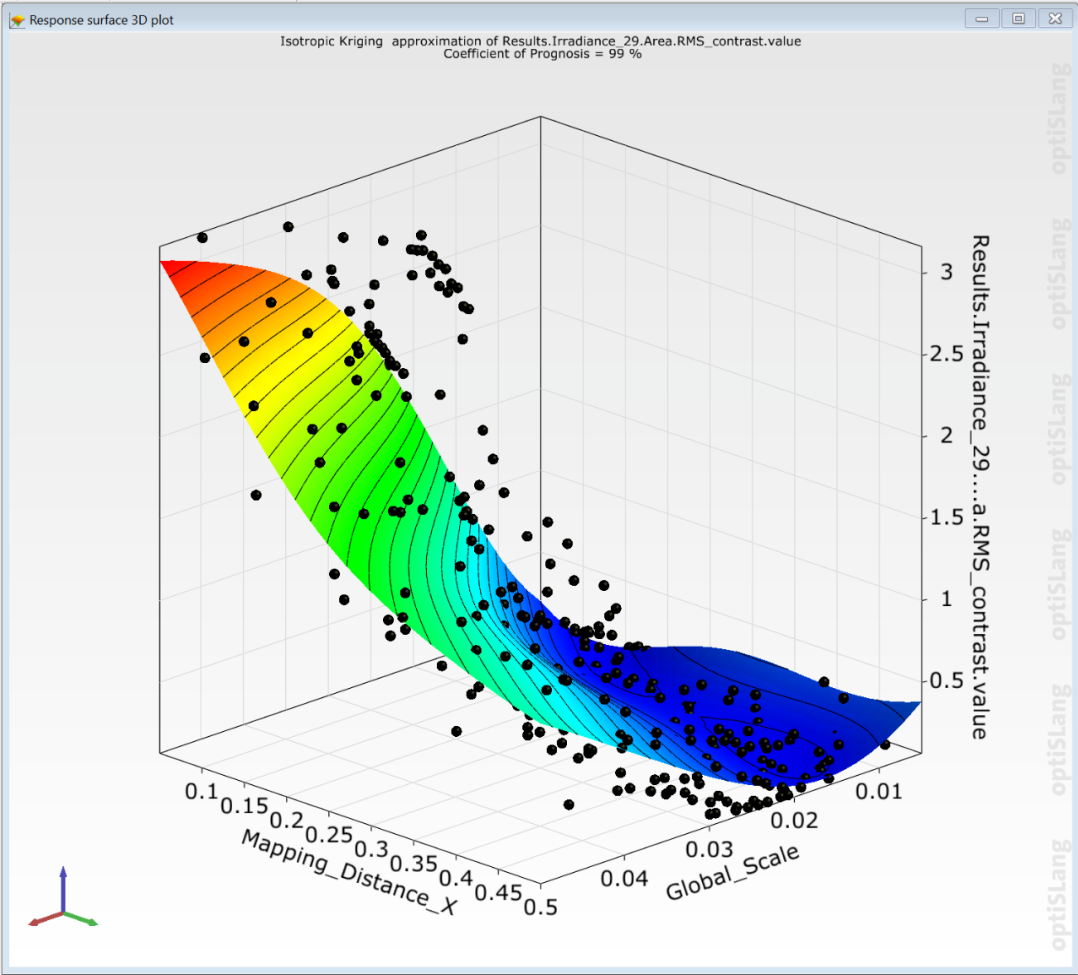
作为输入和输出指定标准是很重要的,因为这将把搜索范围缩小到用户已知的可能条件、期望的目标和约束。对于这个特定的用例,生成了最优预后(AMOP)的自适应元模型。AMOP在几次迭代中运行特定数量的求解器运行,并通过响应面和矩阵表示结果。可以看到CoP矩阵,它显示了输入(水平)与输出(垂直)的总效应。响应面3D图表示影响其中一个输出的最相关输入 (RMS对比)。
第四步:optiSLang 优化分析
在这一步中,Evolutionary Algorithm算法用在全局和局部搜索最佳设计。优化算法在MOP上采样了10,000个设计,以找到导致最佳设计的输入参数值组合。多目标优化的结果在“帕累托图”中可视化(见下图,红黑虚线图)。图中显示了两个目标之间的权衡,其中最佳设计集用红点标记(定义为帕累托前展面)。工作流通过一个真正的求解器调用自动验证20个最佳设计(显示为绿色圆点)。由于COP值较好,预测值与验证值之间的差异较小。从获得最佳权衡(即通量和均匀性之间的平衡)到实现最佳设计(即可接受通量、最佳均匀性),在整个优化过程中都要进行适当的验证。
optiSLang根据参数的数量和类型,确定最适合的优化方法。本文使用随机搜索方法,它模仿自然生物进化的过程,如适应、选择和变异。在本例中,样本的最大数量设置为10000,将在MOP上执行优化,然后使用真正的求解器验证最佳设计。
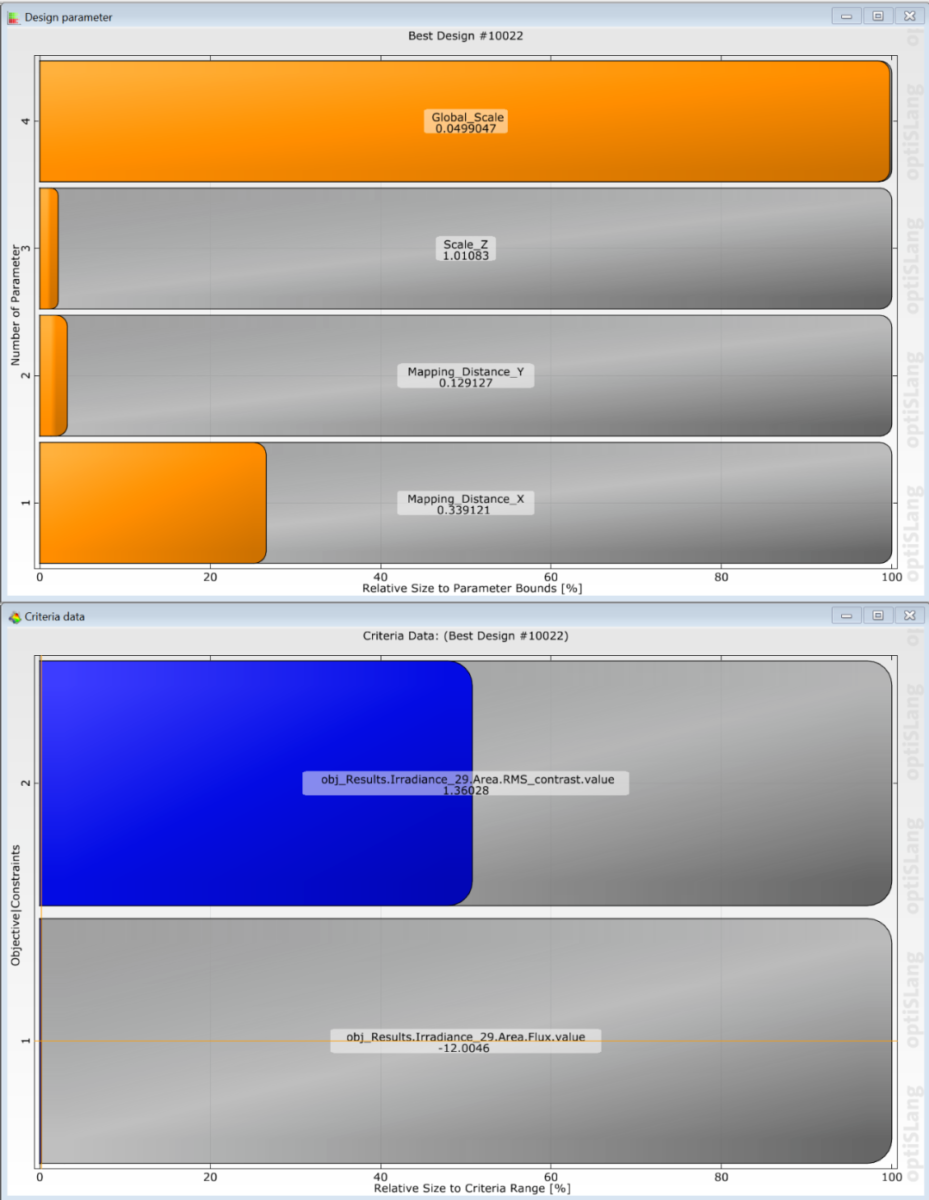
最好的设计参数(输入)可以通过应用到3DTexture和运行Speos模拟来验证。
Speos 中重要参数设置
Remove 3DTexture
“移除”3DTexture由一个“*.OPT3DMapping”文件设置,该文件提供了每个图案元素的位置、方向和大小。敏感度分析和优化创建这个映射文件的不同,以改变纹理模式。每次计算带有3DTexture的模拟时,都会创建一个扩展名为“.bin”的文件。必须让该文件在作业启动时自动写入,而不是手动写入。否则,模式将不会从一个迭代更改到下一个迭代。
照度传感器
为了optiSLang定义目标,必须在初始结果中创建测量值,并将其保存为XML模板,然后将相同的模板导入Speos内部的传感器,得到的仿真结果中包含测量值,并用于优化目标设定。
Maximum number of Surface interactions
Surface的最大交互次数,导光依靠全内反射来引导光,导致许多表面的相互作用。需要从默认值100增加模拟设置1000甚至更大。
Geometric distance tolerance
几何距离公差由于图案元素是微观的,显示的层很薄,层之间的间隙很小,我们必须设置一个比默认值0.05mm更低的几何距离公差,0.005甚至更小。