收录于话题
红外(IR)和光电(EO)系统的快速发展是提高平台情报、监视和侦察(ISR)能力的必要条件。随着战争的发展,ISR系统正逐步部署到各种平台上。随着平台作战条件日趋恶劣,需要快速将新技术集成到这些EO/IR系统中以应对挑战。在性能需求不断增加的同时,对尺寸、重量和功率(SWaP)的限制也在不断收紧,特别是在无人驾驶飞行器(UAV)等航空系统中。
1 精确定位和稳定平台
EO/IR系统是惯性稳定平台携带的最常见的有效载荷,各种传感器系统、照相机和武器系统都属于有效载荷,可以搭载在稳定平台系统中。目前已知的多种平台技术各有其缺点和局限性,这些平台分别是转台系统和万向架系统。
1.1 转台定位系统
在地面和缓慢移动的轴上安装的转台倾斜装置,可用于定位系统。由2-DOF机构和2个垂直轴组成,如倾斜轴套在万向轴上。万向轴可以连续旋转,也可以±180°旋转,但倾斜轴在大多数情况下有硬性限制,最多只能±90°旋转。
对于地面平台来说,定位是唯一的要求,而对于由移动结构承载的平台来说,稳定是精确定位必需的。
图1 转台倾斜系统示例(从左到右: Moog MPT-50、FLIR PTU-D 300Z、ASELSAN Falconeye IRST, EVPU Defense MSR-2/B ST)
图1所示的Moog MPT-50和FLIR PTU-D 300Z只用于定位,而ASELSAN Falconeye IRST和 EVPU Defense MSR-2/B ST则是稳定定位系统。一般来说,它们更适用于海面上的海军监视。对于直升机和无人机等快速移动平台,则需要使用更先进的稳定万向架系统。
1.2 万向架系统
1)第一代万向架系统
在20世纪60年代前,稳定和定位相结合以实现平稳转向的功能还不完善。20世纪60年代末,根据动量守恒原理,加拿大Westinghouse公司研制的WESCAM使用三个正交机械速率陀螺仪进行稳定。这种利用惯性的想法是第一代具有半主动稳定功能的稳定平台,其稳定抖动小于5 μrad。
2)第二代万向架系统
第二代万向架系统采用经典的主动万向架结构。结构更简单、更轻便、成本更低,具有更好的转向性能,但在稳定性方面,逊于第一代系统。每个轴都可以使用直接驱动或齿轮机构。大型有效载荷使用齿轮传动装置会在每个连续的万向架轴上产生高频扭矩,直接限制控制系统的带宽。
3)第三代万向架系统
第三代技术使用了一个高性能的内万向架,它位于外万向架的内部,只用于跟踪功能。能够解决大型有效载荷的带宽限制问题在内外万向架之间安装无源隔离器,以抑制线性振动。有些系统还利用快速反射镜(FSM)进行图像运动补偿。随着高精度光纤陀螺仪(FOG)的使用,第三代系统的稳定性能已接近第一代万向架系统的稳定性能,且比第一代系统更轻、更便宜,而转向和稳定性能优于第二代。
4)第四代万向架系统
第四代万向架系统使用线性音圈驱动器对称地驱动内部万向架,以实现有限的行程,如图2所示。
图2 第四代稳定万向架系统 L3 Harris Wescam MX-20 有效载荷平台上的传感器和驱动器布置图
5)第5代万向架系统
PV Labs公司获得专利的第五代技术建议采用无万向架设计,有效载荷由柔性枢轴元件支撑,并由音圈致动器驱动。因此,轴承产生的运动限制将被排除。这种无万向架设计理念可提供 6-DOF 运动能力,从而实现角度和线性运动补偿。这种设计还建议在外部万向架和有效载荷之间进行主动隔离,以进一步提高在移动平台引起的振动影响下的性能。
图3 第五代无万向架设计- PV LABS PV-15 稳定万向架系统(左侧:内万向架已更换为 6-DOF 运动能力,右侧外万向架正在运行)
2 ISR系统案例
空中平台最适合于ISR应用。因此,示例系统将主要基于用于ISR的空中平台上的EO/IR系统。
2.1 L3Harris Wescam MX-15
L3Harris Wescam的MX-15系统是同类产品中SWaP和性能最好的。它包括可见光、微光、SWIR和MWIR传感器,均为高清格式。它是一个可在线更换的装置,即它可以互换而不需要任何额外的电子设备。它采用坚固的航空航天级铝制结构,配备四轴稳定转塔,还内置了固态惯性测量单元(IMU)。MX-15已部署在直升机和商用飞机等各种平台上。
图4 WESCAM MX-15
2.2 ASELSAN MGEO CATS
图5所示的ASELSAN公司通用孔径瞄准系统(CATS),包括高清可见光、VGA格式近红外和VGA格式中红外传感器。CATS 系统还集成了激光照明器、激光测距仪 (LRF)和激光指示器,可用于瞄准。目前已安装在直升机、飞机和无人机上。
图5 上ASELSAN CATS
2.3 Octopus ISR EPSILON 180
Octopus ISR系统为ISR应用提供了新一代EO/IR系统,如图6所示。针对不同的无人机有效载荷有各种不同的配置。
图6 Octopus ISR EPSILON 180
它有一个VGA中近红外探测器和F/5.5光学镜片,可进行18-275㎜连续变焦,并配有一个CMOS探测器和 30 倍变焦镜头的4K可见光摄像机。MWIR传感器对北约目标的探测距离约为13 km。它还包括一个眼部安全LRF,探测距离为15 km。万向架采用轻型三轴稳定万向架。
2.4 Silent Sentinel Jaeger ULR
图7 Silent Sentinel Jaeger ULR
图7所示的Silent Sentinel公司Jaegar超远距离(ULR)摄像机是一个高性能的高清多传感器平台,配有一个远距离制冷型MWIR高清传感器(分辨率为1280×720)和一个80-960 mm变焦镜头,以及一个高清可见光传感器和一个16.7-2000 mm镜头(打开2×扩展器时为2000 mm)。谐波驱动齿轮与先进的电机驱动技术相结合。Jaegar具有IP67级环保等级和硬质阳极氧化外壳。
3 传感器
3.1可见光和VNIR传感器
在ISR系统中,具有可见光通道始终是首选。然而,可见光传感器只能在白天工作。可以优先考虑使用可见光/近红外(VNIR)传感器,它是将可见光范围扩展到近红外区域的传感器,以便在黑暗的弱光条件下提供更好的成像。
3.2 SWIR传感器
短波红外(SWIR)波段比可见光波段受大气的散射作用小,由于它还可以探测到低反射光,因此非常适合有雾或烟雾的成像应用。
图8 在雾天条件下SWIR对比可见光的优势
3.3 MWIR传感器
中波红外(MWIR)在潮湿环境中能提供更好的图像,在探测范围和图像分辨率明确的情况下,MWIR是首选。同样由于波长较低,MWIR波段的图像质量自然优于长波红外(LWIR)。
Lynred公司的Daphnis HD探测器是第一批高清分辨率MWIR探测器之一,像元间距为10 μm,如图9所示,基于碲镉汞(MCT)技术的焦平面阵列(FPA)。
图9 Lynred Daphnis HD MW
探测器通过旋转式斯特林制冷机进行冷却,可以提供低至4分钟左右的制冷时间。FPA与提供数字输出的读出集成电路(ROIC)集成在一起。
Neutrino探测器是美国Teledyne FLIR公司采用Ⅱ类超晶格(T2SL)技术研制的MWIR探测器系列。它采用具有高温(HOT)技术的FPA,减少了制冷机的负荷,并考虑到SWaP解决方案。
图10 Neutrino SWaP系列传感器模块
图10所示的Neutrino系列传感器具有线性斯特林制冷机,它折叠在杜瓦顶部以减小体积并提供紧凑的封装。
3.4 LWIR传感器
由于具备环境温度背景和战场条件方面的优势,LWIR波段成像更受欢迎。近年来非制冷型LWIR探测器得到了很大的发展。非制冷探测器体积小、重量轻、功耗低、价格便宜,是SWaP - C应用的理想选择。
目前已经有12 μm像元间距的高清格式微测辐射热计投入使用,如Lynreds公司的ATTO1280。Fraunhofer IMS正在解决该技术的局限性,将像元间距缩小到6 μm。
4 未来趋势
4.1 SWaP探测器
中波红外(MWIR)或长波红外(LWIR)波段的红外成像要求在昼夜都能提供清晰的图像。探测器是红外成像通道中最昂贵也是最关键的部分。为LWIR波段选择非制冷探测器是优化系统的明显方法。微测辐射热计的进步使其成像能力具有与制冷型LWIR探测器相媲美的分辨率和灵敏度。因此,采用非制冷探测器在降低成本的同时减小了系统体积、重量和功率。
图11 MCT探测器的像元间距
对于中波红外探测器,其像元间距在测试装置中已降至12 μm、10 μm、8 μm甚至5 μm。由于较小的衍射极限光斑尺寸,工作在较短波长的系统更可能受益于较小的像素尺寸。因此,像元间距对于MWIR至关重要。
像元间距的减小将有助于减小探测器的总尺寸,同时降低制冷机的负载。这将逐步降低制冷机的SWaP。高温探测器是另一种有助于降低制冷负荷的装置。由于工作温度的提高,可以提供更简单和更小的制冷机,这将有利于降低整个系统的SWaP。
4.2 SWaP光学设计
大口径或长光路是光学设计人员为获得高质量图像考虑的两个关键指标。两者都会增大光学系统尺寸。对于不同的传感器可以采用一个共同的孔径来实现大孔径。通过一个大孔径收集光,并使用滤波器和棱镜内部分离各种通道。
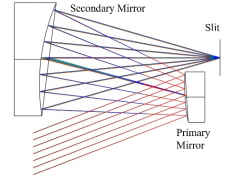
另一种方法是增加光路。可以通过使用反射镜对光路进行折叠来完成。例如,Ophir公司的折叠光学16 -180mm f / 3.6变焦镜头,该镜头针对MWIR 10 μm像元探测器进行了优化,如图12所示。该镜头的探测距离约为13 km。
图12 OPHIR LightIR 16-180 mm F/3.6镜头
先进的光学解决方案可在不对无人机有效载荷造成重大负担的情况下获得高成像质量。配备了最好的探测器、图像处理软件和监视器的无人机还必须配备高性能的镜头,否则可能会导致图像质量不佳。
4.3 非传统驱动方法
(1)压电驱动器
在大多数EO/IR应用中,重量和稳定性是最重要的关注点。当高带宽受到关注时,压电驱动器的快速响应时间变得占主导地位。它们的特点是高功率密度、快速响应和直接驱动能力。这些特性使压电驱动器成为小型光电和机械系统的最佳候选者。
图13 Nanomotion有限公司Velox压电驱动万向架系统
除了万向架系统外,快速反射镜( Fast Steering Mirrors,FSM )还采用了叠层式压电驱动器,利用其高带宽特性来补偿抖动,这是大型万向架机械和重型有效载荷的经典驱动器无法实现的。
图14 压电驱动FSM和堆叠式压电驱动器
(2)音圈驱动器
音圈电机在精密应用方面具有优越的性能。由于无芯结构使它们不具有齿槽转矩,并在闭环中实现高带宽频率。在本文中,第四代和第五代稳定万向架系统在内部万向架中使用音圈驱动器,为有限的行程提供高带宽驱动。
与压电驱动器类似,音圈驱动器由于其优越的加速性能被用于双轴快速反射镜应用。在FSM中使用线性音圈驱动器的例子如图15所示。
图15 线性音圈驱动快速转向镜
光学调焦是光电系统的基本要求之一,通过系统内透镜的机械运动来实现。线性音圈驱动器的空心轴结构使其成为光学聚焦应用的理想选择,如图16所示。
图16 光学聚焦用大空心轴线性音圈
5 结论
多年来,传感器、驱动器和光电/红外系统技术取得了很大进展。以上这些技术的进步为更强大、更可靠、成本更低的系统提供了新的思路,并为许多进一步改进开辟了道路。可见,更轻便、低成本、高性能的ISR平台的需求将推动未来技术的进一步发展。
(天津津航技术物理研究所
靳婷 杨茗 编译)
本文出处
发表于:SPIE网站
了解津航光电最新动态
声明:本文所用视频、图片、文字如涉及版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除。邮箱:qingbaozu8358@sina.com
文章转载自微信公众号:津航光电