收录于话题
摘要
为适应中高空机载多波长激光雷达对地高分辨三维成像发展需求,实现光谱和水陆一体化探测目的,本文提出了一种三波长线性和单光子复合探测激光雷达系统,采用三波长阵列光束照明结合菲涅尔棱镜圆锥扫描方式,实现机载平台快速对地多波长三维成像。本文从系统工作原理出发,详细介绍了三波长激光光源模块、菲涅尔棱镜光束扫描模块、多波长共轴收发光学系统以及线性和单光子复合探测、采集、数据处理等部分。多波长激光共孔径收发、同步采集、处理、存储,保证了光谱与空间几何数据在空间和时间上的完整性和一致性,进而为多波长数据融合和水陆一体化探测提供数据支撑。
为测试和评估机载三波长激光雷达的性能,首先进行了系统静态测试, 完成了三波长3.6 km目标静态测距试验;然后进行了地面动态测试, 完成了系统软硬件联调试验,成像数据与商业雷达基本一致;最后通过机载飞行试验,完成了城市、工业区、丘陵、水库等区域机载对地三波长三维成像,初步实现了水陆一体化探测和三波长线性与单光子数据在光谱和空间维度上的融合。
1 引言
机载多波长激光雷达是一种主动式对地测绘、侦察设备,相对于常规机载激光雷达,可实现地物光谱和几何数据一体化获取, 兼具水陆一体化探测能力。在陆地、潮间带、岛礁和近岸浅水区的地形地貌测量、水下目标探测,遮蔽、伪装目标探测和识别等领域具有广泛应用前景。从发展历程来看,机载激光雷达在探测手段上主要经历了“单波长-双波长-多波长(多光谱)-高光谱”的变革。
为适应中高空(3~6 km)机载多波长激光雷达对地高分辨三维成像发展需求,实现远距离多波长激光三维成像、兼具光谱和水陆一体化探测功能,本文提出了一种三波长线性和单光子复合探测的激光雷达系统,复合探测体制充分利用了单光子面阵探测工作距离远、空间分辨率高和线性小面阵探测工作距离远、 强度分辨率高的特点。在三波长激光雷达系统中,激光光源采用紧凑光机设计实现两台激光器光机集成,完成三波长同步输出;多波长激光点阵收发光学实现高效能量利用;菲涅尔棱镜应用实现扫描系统的大口径、轻量化、高转速和高精度;水陆兼容分视场设计与单光子面阵探测技术的结合,实现高分辨大动态水陆探测需求。三波长共孔径,同步信号采集、处理和存储保证了光谱与空间几何数据在空间和时间上的完整性和一致性,为实现多波长数据融合和水陆一体化探测提供了保障。试验验证表明机载三波长激光雷达系统具备中高空多波长探测能力(>3 km),实现了机载水陆一体化探测,完成了线性和单光子复合探测体制验证, 实现了多波长双探测体制数据在空间和光谱上的融合。
2 系统工作原理
机载三波长激光雷达系统由三波长激光光源、激光发射单元、扫描单元、接收光学单元、多型探测器、综合控制板、信息采集处理板、存储板、POS (position orientation system)系统和相机等组成。
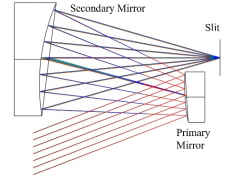
系统工作原理: 在综合控制板的控制信号作用下,激光光源上电,调Q信号触发激光光源同步输出三波长 532/1064/1570 nm激光脉冲,通过PIN管(positive intrinsic negative diode)进行出光信号采集;激光发射单元将独立三束激光分别进行准直扩束, 进入衍射光学元件(diffraction optical element, DOE)进行激光分束, 然后进行三波长激光合束;扫描单元由电机、电机驱动器、薄壁轴承、码盘和菲涅尔棱镜组成,对入射光束进行偏转,完成圆锥扫描;激光照射到陆地、水面和水底后产生陆地、水面和水底回波信号, 接收光学单元收集多波长激光回波信号,其主要由格里高利望远镜、二色分光镜、窄带滤光片和后端聚焦光路组成,增加窄带带通滤波器以减小杂散光影响,其中单光子探测通道带宽<1 nm,其他通道带宽为2 nm;望远镜收集到的光信号分别由四型探测器将激光回波光信号转换为电信号,4个通道分别为接收1064 nm 3×3 Si-APD (avalanche photo diode)通道、1570 nm 2×2 InGaAsAPD通道、532 nm深水大视场1×1 PMT (photomultiplier tube)通道以及532 nm陆地及浅水窄视场8×8 PMT通道,探测器规模以中小规模为主,主要考虑机载平台对载荷在体积、重量、功耗方面的限制。信息采集处理板将前三个通道电信号经过ADC (analog to digital converter)采样后形成全波采样数据、单光子通道输出电信号经过TDC (time to digital convertor)后形成单光子计时数据、扫描单元编码器输出ABZ脉冲信号经解算后形成角度数据、相机输出曝光信号生成时间戳数据,并按数据输入源分别进行打包传输给存储板;存储板完成所有原始数据存储;POS系统由GPS(global position system)和IMU(inertial measurement unit)组成,获取激光雷达精确的定位和时间基准、飞行速度和航向、俯仰和翻滚等姿态信息,其发出秒脉冲(pulse per second, PPS)作为综合控制板同步信号;相机记录地表或者水体高分辨率影像数据,用于分类和点云数据融合等。
3 实验验证
3.1 静态测试实验
机载三波长激光雷达采用阵列光束照明方式。因远距离传输后阵列光束空间展开,实验需选取表面积大的目标(3.6 km×4.6 mrad=16.6 m@3×3)。探测目标(成都伊泰天骄)以及其上光束阵列空间分布情况,如图1(a)所示。实验场与目标在地图上的空间位置分布, 如图1(b)所示。两者在地图上显示距离约3.6 km,激光光源同步发射三波长激光脉冲,接收端同步接收激光回波信号。1570 nm波长全波形采集数据,如图1(c)所示,图中的插图为光取样信号波形,测距数据为激光回波时间与激光取样时间的时间差,其距离信息为3613.6 m;1064 nm波长全波形采集数据,如图1(d)所示,测距数据为3613.8 m;532 nm光子计数采集数据,如图4(e)所示,图中光子计数波形累积了300个脉冲,以光取样信号作为TDC计时开始信号,图中峰值位置3614 m即为测距数据。三个波长激光测距能力都大于3 km,系统具备中远程激光成像能力。
图1 静态测距试验(a)目标场景; (b) 实验地与目标在地图上分布; (c)1064 nm全波形采集数据; (d)1570nm全波形采集数据; (e) 532nm单光子计数数据
3.2 地面动态试验
地面动态试验主要基于推车平台,实验目的是开展激光雷达、POS系统、RTK (real time kinematic)基站、相机、码盘等系统级联调,完成硬件系统、上位机软件功能验证,以及后续数据处理算法验证。在楼顶开阔楼面上开展低速动态成像实验,实验装置为机载三波长激光雷达与RIEGL_VUX-1LR激光雷达,两者固联,两台激光雷达共用一套POS系统APX-20。楼顶实验场地、三波长激光雷达、RIEGL_VUX-1LR激光雷达及动平台。实验过程中,首先系统所有设备上电,POS系统静置5 min,完成静态校准;然后进行绕八字姿态校准,激光雷达开始数据采集和存储数据;数据采集结束后激光雷达停止工作,移动平台绕八字姿态校准、静置5 min静态校准,实验结束。
3.3 机载飞行实验
3.3.1 机载飞行试验基本情况
2021年12月,机载三波长激光雷达样机在自贡鹤鸣机场进行了机载飞行实验,激光雷达系统主要包括三波长激光雷达主机以及水冷机、电源、上位机显控软件等部分。搭载平台为塞斯纳208-B飞机,飞行速度200~220 km/h,飞行高度在500~1000 m,共飞行2个架次,总时长5h,获取了49条航带数据。
3.3.2 城市环境数据以及点云精度分析
城市环境数据的分析选取了一处在建的高层建筑物工地以及旁边的学校操场. 航空相机照片数据如图2(a)所示。图2(b)和(c)为激光雷达的高层图像和强度图像,从回波强度和空间几何二个维度展示了同一目标区域。测试场景的细节(如街上的电线)展示如图2(d) 所示,操场上人工草坪的条纹展示如图2(e)所示,高层建筑物工地塔吊展示如图2(f)所示,该系统采用圆锥扫描方式结合重叠航带的设计,实现对高层建筑物4个不同方向的扫描,完成对高层建筑物所有外立面的探测和重建。
图2 城市环境数据. (a) 航空相机照片; (b) 点云高层图像; (c) 点云强度图像; (d) 街上的电线; (e) 操场上人工草坪的条纹; (f) 多视角扫描高层建筑物和塔吊成像
点云位置精度量化指标为平面拟合RMS值。将点云数据中人字型屋顶进行提取,然后进行平面拟合并计算拟合平面的RMS值。评估区域为某县城工业园区。工业园区内存在大量的人字型屋顶,有利于点云位置精度的评估。
3.3.3 多光谱复合探测体制数据融合
光谱与空间几何数据在空间和时间上的完整性和一致性是进行多波长数据融合的前提,多波长数据融合包括空间点云融合和强度融合(光谱信息)。提取工业区某区域(图3(d))的三个波长点云数据,并对各个波长数据各自归一化,1570 nm激光回波为Red通道,如图3(a)所示;1064 nm激光回波为Green通道,如图 3(b)所示;532 nm激光回波为Blue通道,如图3(c)所示。
在空间点云融合方面,通过硬件实现点云时间和空间配准,直接融合后的数据包含Red通道(90772/point)、Green通道(177261/point)、Blue通道(811071/ point), 融合后点云密度得到极大提升,弥补了环境因素和目标反射率差异导致的数据空洞,数据质量得到了提升,融合结果如图3(e)所示。
图3 单波长归一化强度图. (a) 1570 nm; (b) 1064 nm; (c) 532 nm; (d) 测试区航空相机照片; (e) 空间点云融合数据; (f) 伪彩色多光谱点云数据
4 结论
为实现中高空机载对地多波长高分辨激光三维成像,兼具多光谱和水陆一体化探测能力,研制了一台三波长线性和单光子复合探测的激光雷达样机。系统完成了两台激光器光机集成,三波长同步输出, 轻量化菲涅尔棱镜扫描系统,多波长激光点阵共轴收发、兼顾大小视场的光学系统, 以及线性和单光子信号同步采集和处理。机载三波长激光雷达在硬件上具有多波长共孔径收发、同步信号采集、处理和存储的特点,保证了光谱与空间几何数据在空间和时间上相对完整和一致,为实现多波长数据融合和水陆一体化探测提供了保障。
地面静态实验验证了激光雷达具备大于 3 km测距成像能力,动态试验、机载飞行试验完成了软硬件全要素工作以及在机载环境下系统稳定性验证。试验结果表明,机载三波长激光雷达系统具备中高空多波长对地三维成像以及水陆一体化探测能力,初步验证了线性和单光子数据在空间和光谱维度上融合的可行性,为实现空间三维与光谱信息一体化以及水陆数据一体化快速高效获取提供了技术手段。未来将在线 性与单光子探测体制优化、多体制光谱数据强度校正、消色差菲涅尔棱镜设计等方面开展进一步工作。
本文出处
发表于:《中国科学》
了解津航光电最新动态
声明:本文所用视频、图片、文字如涉及版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除。邮箱:qingbaozu8358@sina.com
文章转载自微信公众号:津航光电