
随着工厂智能化转型的深入,“无人工厂”、“黑灯工厂”不断涌现,工厂车间“少人化”、“无人化”,取而代之的是大量工业机器人的应用,在此背景下,如何确保工业机器人空间位置精度,保障其准确运行变得十分关键。

工业机器人空间位置精度误差主要分为运动学误差和动力学误差。运动学误差主要包含加工误差、机械公差/装配误差、零点误差、减速器回差、减速比误差、标定误差等;动力学误差主要包含质量/重心、惯性张量、摩擦力、关节柔性、连杆柔性等。
六轴工业机器人系统本质上是一种半闭环的控制结构,系统只能精确控制关节伺服电机位置,而电机位置与机器人末端执行器位姿之间关系通过运动学确定。理论运动学模型与实际模型之间不可避免存在误差,因此需要通过标定提高机器人的空间绝对位置精度。
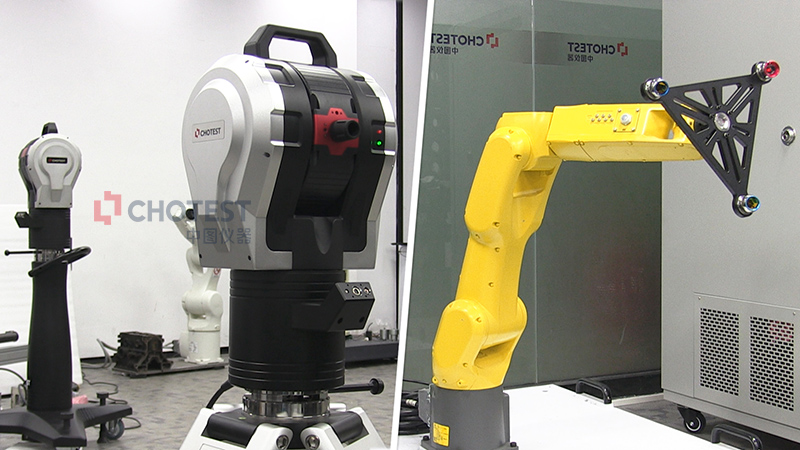
GTS激光跟踪仪+RobotMaster软件高效检测工业机器人空间绝对位置精度测量标定和性能。
标定时,通过机器人的连杆理论长度、各关节旋转方向、机器人零点状态、各关节理论减速比这四项参数建立机器人理论运动学模型,让机器人运行30-50个关节角坐标点位,激光跟踪仪记录机器人法兰盘末端坐标。RobotMaster软件通过不断迭代计算,修正机器人运动学模型直至达到状态,将运动学模型修正至机器人系统,机器人空间绝对位置精度即可得到一定的提升,标定后空间绝对位置精度相对标定前可提升3~15倍左右。
RobotMaster软件还可以按照《ISO 9283工业机器人性能规范及其实验方法》对机器人在位置、姿态、轨迹等方面进行性能检测,检测内容包括14大项:
1.机器人位姿准确度和位姿重复性
2.多方向位姿准确度变动
3.距离准确度和距离重复性
4.位置稳定时间
5.位置超调量
6.位姿特性偏移
7.互换性
8.轨迹准确度和轨迹重复性
9.重复定向轨迹准确度
10.拐角偏差
11.轨迹速度特性
12.最小定位时间
13.静态柔顺性
14.摆动偏差
GTS激光跟踪仪+RobotMaster助力先进制造,提升机器人运动精度。